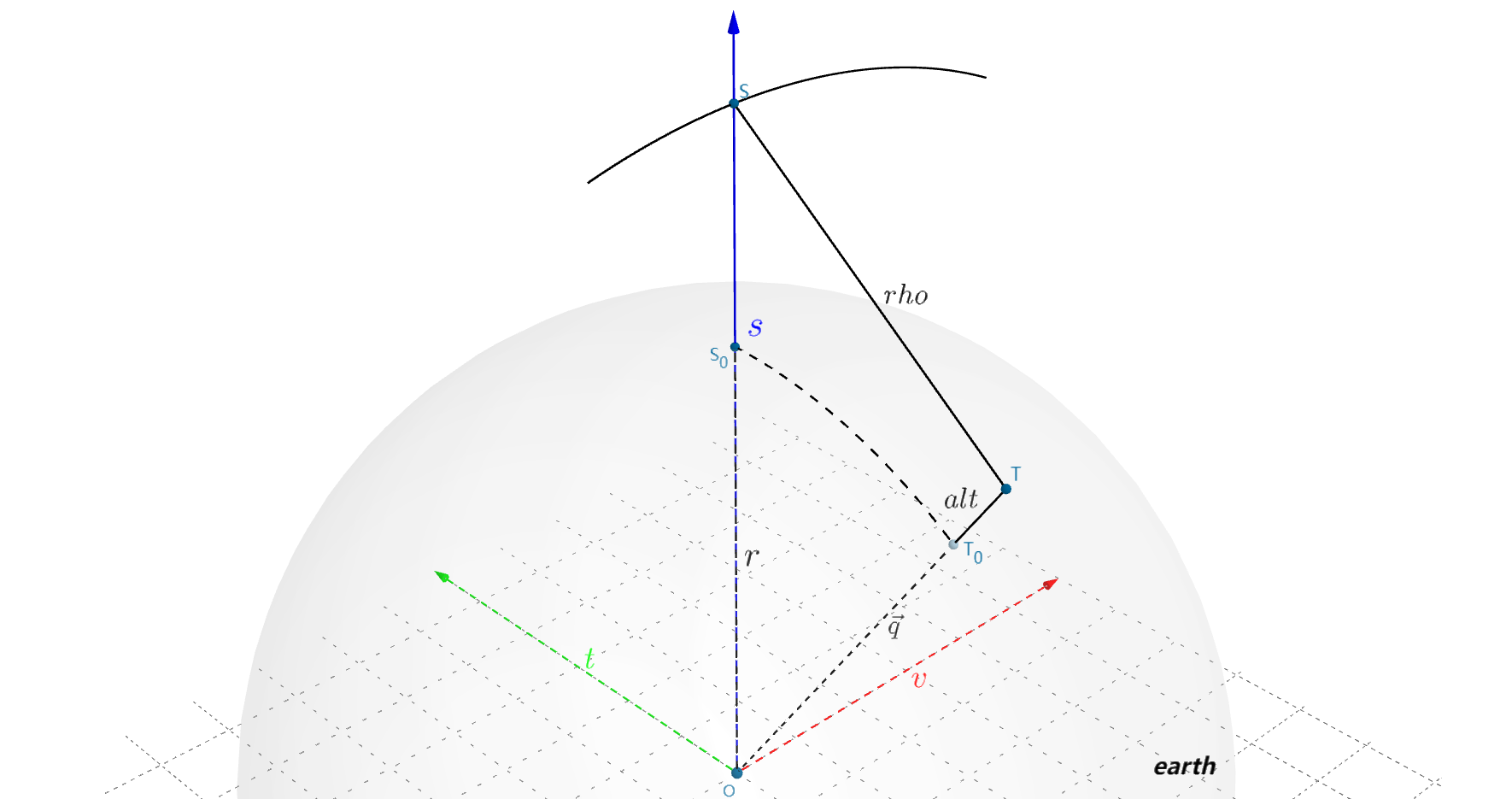
通过指定的斜距 rho和轨道位置矢量 s, v计算出其对应的大地坐标 lat, lon
代码涉及点和向量信息如下图所示,
llh parameter_sar::get_target_loc(double az_row, double sr_col, double alt)
{
double C = 299792458;
double rho = this->get_slant_range(sr_col);
double fc = radar_frequency;
int s_flag = (look_direction == Look_Diredction::right)?-1:1;
double state_t = this->get_azimuth_time(az_row);
double fd = 0;
if (!azimuth_deskew) {
fd = get_fd(state_t, rho);
}
xyz s = this->get_state_pos(state_t );
xyz v = this->get_state_velo(state_t );
llh dst;
double a, b, c, r, r1, lam;
double s2, v2, t2, sv, det;
double lat1, lon1, alt1, c1, c2, c3;
double r_new;
xyz q, t;
int iter;
lam = C / fc;
s2 = s * s;
v2 = v * v;
sv = v * s;
llh temp = s.to_llh();
lon1 = temp.longitude;
lat1 = temp.latitude;
alt1 = temp.height;
r = sqrt(s2) - alt1;
t = s.cross(v);
t2 = t * t;
iter = 0;
while (iter < 17 )
{
iter++;
a = (s2 + SQR(r + alt) - SQR(rho)) / 2.0;
b = (lam * rho * fd + 2.0 * sv) / 2.0;
c = SQR(r + alt);
det = s2 * v2 - SQR(sv);
c1 = (a * v2 - b * sv) / det;
c2 = (b * s2 - a * sv) / det;
c3 = double(s_flag) * sqrt((c - pow(c1,2) * s2 - pow(c2,2) * v2 - 2.0 * c1 * c2 * sv)/t2);
q = s * c1 + v *c2 + t * c3;
llh temp2 = q.to_llh();
lon1 = temp2.longitude;
lat1 = temp2.latitude;
alt1 = temp2.height;
r1 = q.norm();
r_new = r1 - alt1;
if (fabs(r_new - r) < .001)
break;
r = r_new;
}
dst.latitude = lat1;
dst.longitude = lon1;
dst.height = alt;
return dst;
}
代码中的a和b和det可以进一步推导得到:
a==b==det====2s2+q2−rho2∣s∣∣q∣cos(∠soq)2λ⋅rho⋅fd+2⋅svq⋅vs2v2−(sv)2∣s∣2∣v∣2−∣s∣2∣v∣2cos2(∠sov)∣s∣2∣v∣2sin2(∠sov)∣t∣2
这里将 r+alt等效为 ∣q∣ ,但实际上两者存在一定误差,下一节在讨论该问题。
分别带入 c1和 c2,得到:
c1===c2===deta⋅v2�−b⋅sv∣s∣2∣v∣2sin2(∠sov)∣s∣∣q∣cos(∠soq)∣v∣2−∣q∣∣v∣cos(∠qov)∣s∣∣v∣cos(∠sov)∣s∣sin2(∠sov)∣q∣cos(∠soq)−∣q∣cos(∠qov)cos(∠sov)detb⋅s2−a⋅sv∣s∣2∣v∣2sin2(∠sov)∣q∣∣v∣cos(∠qov)∣s∣2−∣s∣∣q∣cos(∠soq)∣s∣∣v∣cos(∠sov)∣v∣sin2(∠sov)∣q∣cos(∠qov)−∣q∣cos(∠soq)cos(∠sov)
如果近似的认为 ∠sov≈90°,则有,
cos(∠sov)≈0sin(∠sov)≈1
从而得到 c1和 c2的近似值:
c1=c2=∣s∣∣q∣cos(∠soq)∣v∣∣q∣cos(∠qov)
同理,得到 c3:
c3===±t2q2−c12s2−c22v2−2c1⋅c2⋅sv±∣t∣q2−∣q∣2cos2(∠soq)−∣q∣2cos2(∠qov)±∣t∣∣q∣cos(∠qot)
可知, c1、 c2、 c3分别为向量q的单位向量在 s、 v、 t坐标轴上的分量,所以有:
q=c1⋅s+c2⋅v+c3⋅t
上一节中默认将 r+alt等效为 ∣q∣,但实际上两者存在一定误差。
为了简化公式,现记误差值 r+alt为 q^,可以得到:
c1=c2=c3=≈∣s∣∣q^∣cos(∠q^os)∣v∣∣q∣cos(∠qov)±∣t∣q^2−∣q^∣2cos2(∠q^os)−∣q∣2cos2(∠qov)±∣t∣∣q^∣cos(∠q^ot)
所以,
q=c1⋅s+c2⋅v+c3⋅t
通过上式得到的向量 q^k+1的模长介于 ∣q^k∣和 ∣q∣之间,满足迭代收敛条件。
通过指定的地面点坐标 RT, 计算其对应的方位向时间 tazi, 从而获取行列值的过程。
在地面点坐标和其他卫星参数已知的情况下, 方位向多普勒方程仅卫星位置矢量为未知条件, 且卫星位置矢量又是方位向时间的变量, 所以满足基本解算条件。
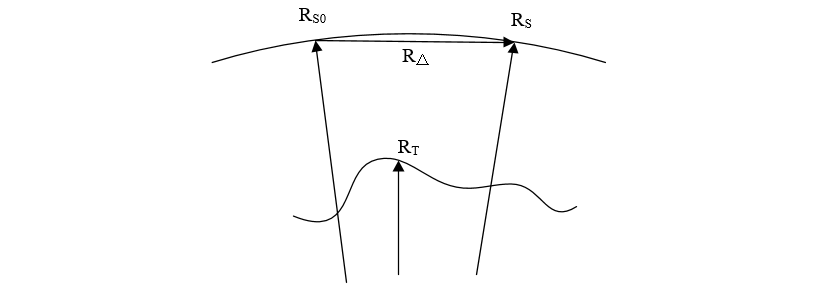
设卫星位置矢量的初始值为 RS0(通过初始时间t0计算得到), 满足多普勒频移公式的真实卫星位置矢量为 RS^, 初始值与真值的相对位置关系为
RS^=RS0+RΔ
三组位置矢量的相对位置关系如图所示,
因为位置矢量真值RS^与地面点坐标之间多普勒频移公式,所以将真值代入公式并简单整理后可得
2fdλ∣RS−RT∣=(RS−RT)VS
将真值替换为初始值,可得
2fdλ∣RS0−RT∣=(RS0−RT)VS+RΔVS
等号左侧,将∣RS−RT∣近似替换为∣RS0−RT∣,虽然存在误差但通过迭代可以逐渐消除。整理后得到,
2fdλ∣RS0−RT∣−(RS0−RT)VS===RΔVS∣RΔ∣∣VS∣cos(0)∣RΔ∣∣VS∣
由 RS^、 RS0和 RΔ的几何关系图可知 ∣RΔ∣=Δt∣VS∣, 代入公式可得,
Δt=∣VS∣221fdλ∣RS0−RT∣−(RS0−RT)VS
使用迭代值Δt,对初始时间t0进行修正,多次迭代后即可得到正确结果。
double parameter_sar::get_state_t_iter(xyz target_point, bool& iter_succeed)
{
int iter = 0;
double t1 = get_azimuth_time(0);
double alpha = 0.0;
do{
iter++;
t1 += alpha;
xyz pos = get_state_pos(t1);
xyz velo = get_state_velo(t1);
xyz state_2_target = target_point - pos;
double fd = 0;
if(!azimuth_deskew){
fd = this->get_fd(t1,state_2_target.norm());
}
double lambda = get_wave_length();
alpha = -(fd * lambda / 2.*state_2_target.norm() - velo * state_2_target) / (velo * velo);
}while(fabs(alpha)>0. && iter <= 16);
if(fabs(alpha) < 0.00001){
iter_succeed = true;
}else{
iter_succeed = false;
}
return t1;
}