统计影像的均值和方差时,常规做法是先循环一遍计算均值,再循环一遍计算方差,但通过推导方差计算公式,可以简化上述操作,缩短统计耗时。
float mean = 0 , std = 0 ; for ( int i = 0 ; i < arr_size ; i ++ ) { mean += arr [ i ] ; std += arr [ i ] * arr [ i ] ; } mean /= valid_num ; std = sqrtf ( std / ( valid_num - 1 ) - valid_num / ( valid_num - 1 ) * mean * mean ) ; 均值、方差的公式
x ˉ = 1 n ∑ x i S t d = 1 n − 1 ∑ ( x i − x ˉ ) 2 = 1 n − 1 ( ∑ x i 2 − n x ˉ 2 ) \begin{aligned}
\bar{x} =& \frac{1}{n}\sum x_i \\
Std =& \sqrt{\frac{1}{n-1}\sum {(x_i - \bar{x})}^2} \\
=& \sqrt{\frac{1}{n-1}(\sum{{x_i}^2}-n{\bar{x}}^2)}
\end{aligned} x ˉ = St d = = n 1 ∑ x i n − 1 1 ∑ ( x i − x ˉ ) 2 n − 1 1 ( ∑ x i 2 − n x ˉ 2 ) 方差的推导过程,
S t d 2 = 1 n − 1 ∑ ( x i − x ˉ ) 2 = 1 n − 1 ∑ ( x i 2 − 2 x ˉ ⋅ x i + x ˉ 2 ) = 1 n − 1 ( ∑ x i 2 − 2 x ˉ ⋅ ∑ x i + n x ˉ 2 ) = 1 n − 1 ( ∑ x i 2 − 2 n x ˉ 2 + n x ˉ 2 ) = 1 n − 1 ( ∑ x i 2 − n x ˉ 2 ) ⇒ S t d = 1 n − 1 ( ∑ x i 2 − n x ˉ 2 ) \begin{aligned}
&{Std}^2&=& \frac{1}{n-1}\sum {(x_i - \bar{x})}^2 \\
& &=& \frac{1}{n-1}\sum ({x_i}^2 - 2\bar{x}\cdot x_i+{\bar{x}}^2) \\
& &=& \frac{1}{n-1}(\sum {x_i}^2 - 2 \bar{x} \cdot \sum x_i + n {\bar{x}}^2) \\
& &=& \frac{1}{n-1}(\sum {x_i}^2 - 2 n {\bar{x}}^2 + n {\bar{x}}^2) \\
& &=& \frac{1}{n-1}(\sum {x_i}^2 - n {\bar{x}}^2) \\ \\
\Rarr & Std &=& \sqrt{\frac{1}{n-1}(\sum{{x_i}^2}-n{\bar{x}}^2)}
\end{aligned} ⇒ St d 2 St d = = = = = = n − 1 1 ∑ ( x i − x ˉ ) 2 n − 1 1 ∑ ( x i 2 − 2 x ˉ ⋅ x i + x ˉ 2 ) n − 1 1 ( ∑ x i 2 − 2 x ˉ ⋅ ∑ x i + n x ˉ 2 ) n − 1 1 ( ∑ x i 2 − 2 n x ˉ 2 + n x ˉ 2 ) n − 1 1 ( ∑ x i 2 − n x ˉ 2 ) n − 1 1 ( ∑ x i 2 − n x ˉ 2 )
Qi Zhang, Xiaoyong Shen, Li Xu, and Jiaya Jia, ‘Rolling Guidance Filter’, ECCV 2014, pp. 812–830, 2014.
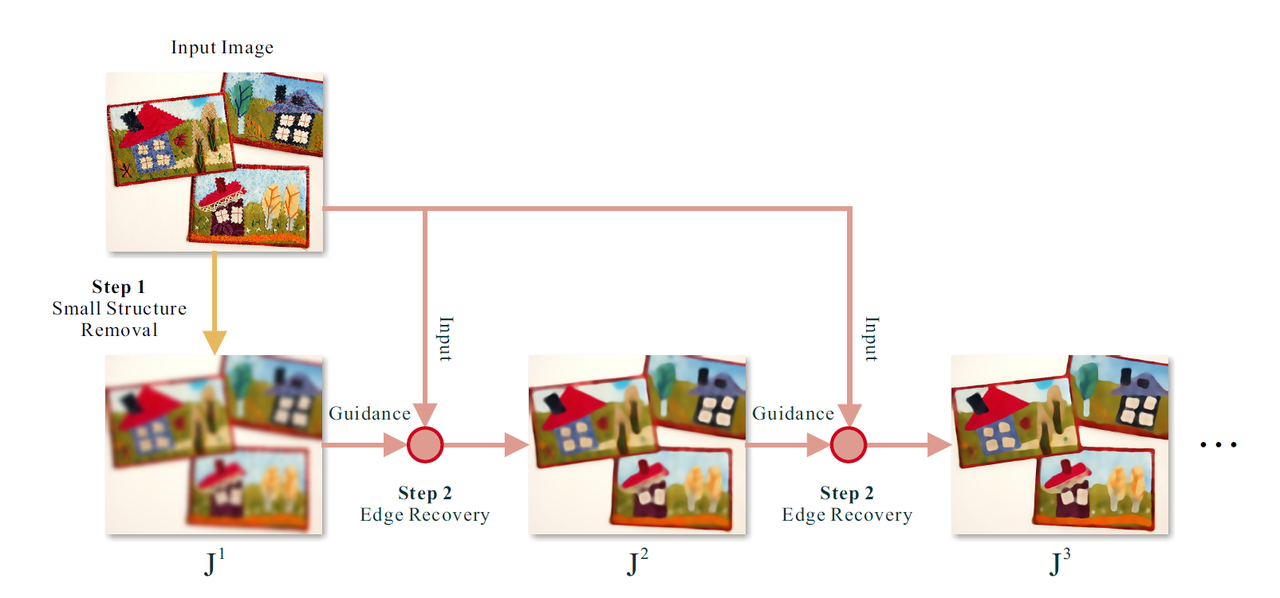
J 1 ( p ) = 1 K p ∑ q ∈ N ( p ) exp ( − ∥ p − q ∥ 2 2 σ s 2 ) I ( q ) J_1(p)=\frac{1}{K_p}\displaystyle\sum_{q\in N(p)}\exp \bigg(-\frac{ {\|p-q\|}^2} {2\sigma_s^2}\bigg)I(q) J 1 ( p ) = K p 1 q ∈ N ( p ) ∑ exp ( − 2 σ s 2 ∥ p − q ∥ 2 ) I ( q ) K p = ∑ q ∈ N ( p ) exp ( − ∥ p − q ∥ 2 2 σ s 2 ) K_p=\displaystyle\sum_{q\in N(p)}{\exp \big(-\frac{ {\|p-q\|}^2} {2\sigma_s^2}\big)} K p = q ∈ N ( p ) ∑ exp ( − 2 σ s 2 ∥ p − q ∥ 2 ) 其中, p p p q q q p p p I I I σ s 2 \sigma_s^2 σ s 2 σ s 2 \sigma_s^2 σ s 2
(This filter completely removes structures whose scale is smaller than σ s 2 \sigma_s^2 σ s 2
J t + 1 ( p ) = 1 K p ∑ q ∈ N ( p ) exp ( − ∥ p − q ∥ 2 2 σ s 2 − ∥ J t ( p ) − J t ( q ) ∥ 2 2 σ r 2 ) I ( q ) J_{t+1}(p)=\frac{1}{K_p}\displaystyle\sum_{q\in N(p)}\exp \bigg(-\frac{ {\|p-q\|}^2}{2\sigma_s^2}-\frac{ {\|J_t(p)-J_t(q)\|}^2}{2\sigma_r^2}\bigg)I(q) J t + 1 ( p ) = K p 1 q ∈ N ( p ) ∑ exp ( − 2 σ s 2 ∥ p − q ∥ 2 − 2 σ r 2 ∥ J t ( p ) − J t ( q ) ∥ 2 ) I ( q ) K p = ∑ q ∈ N ( p ) exp ( − ∥ p − q ∥ 2 2 σ s 2 − ∥ J t ( p ) − J t ( q ) ∥ 2 2 σ r 2 ) K_p=\displaystyle\sum_{q\in N(p)}\exp \bigg(-\frac{ {\|p-q\|}^2}{2\sigma_s^2}-\frac{ {\|J_t(p)-J_t(q)\|}^2}{2\sigma_r^2}\bigg) K p = q ∈ N ( p ) ∑ exp ( − 2 σ s 2 ∥ p − q ∥ 2 − 2 σ r 2 ∥ J t ( p ) − J t ( q ) ∥ 2 ) 其中,p p p q q q p p p t = 1 , 2 , … , n t=1,2,…,n t = 1 , 2 , … , n I I I σ s 2 \sigma_s^2 σ s 2 σ r 2 \sigma_r^2 σ r 2
σ s 2 \sigma_s^2 σ s 2 σ r 2 \sigma_r^2 σ r 2
经典的频谱滤波
R. M. Goldstein and C. L. Werner, ‘Radar interferogram filtering for geophysical applications’, Geophysical Research Letters, vol. 25, no. 21, pp. 4035–4038, 1998, doi: 10.1029/1998GL900033
H ( u , v ) = S { ∣ Z ( u , v ) ∣ } α ⋅ Z ( u , v ) H(u,v) = {S\{ \lvert Z(u,v)\rvert \}}^\alpha \cdot Z(u,v) H ( u , v ) = S {∣ Z ( u , v )∣} α ⋅ Z ( u , v ) 优化方向主要有两种,一是优化平滑算子s { ⋅ } s\{\cdot\} s { ⋅ } ⋅ α {\cdot}^{\alpha} ⋅ α
baran滤波,使用相干图作为滤波系数
zhao滤波,使用伪相干图作为滤波�系数
某个软件,使用bessi0函数生成二维矩阵,在时域点乘后通过FFT转换到频域(时域点乘等于频域卷积),使用频域功率谱计算得到系数,将系数附加到频域后在通过IFFT转换回时域,完成滤波操作。
当然,老老实实写个均值滤波算子在频域做卷积运算,也是可以的,但效果确实不如上述方法。